时间:2019-01-27 19:56来源:无人机 作者:中国通航
|
在有人-无人机(蜂群)协同作战方面,作为空中指挥者的有人机其机载武器、通信设备等均与蜂群中的无人机不同,因此可以将有人-无人机协同作战系统视为一个异构动力学的多智能体系统。
 图7 美国海军公开X-47B与F/A-18协同测试的照片
2014年8月,美海军首次进行有人驾驶舰载机与舰载无人机在航母上共同起降。在试验中,两架F/A-18“大黄蜂”战斗机和一架X-47B舰载无人机以相同的模式从“罗斯福”号核动力航母上起飞,以此来测试这种舰载无人机的起飞和降落能力。有人机与无人机协同作战难在空中控制,美国今后研究的重点是无人机的空中控制能力。
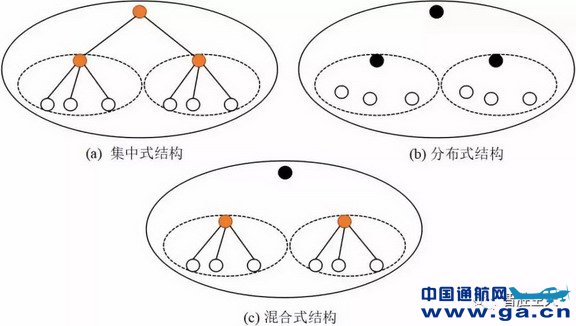
2.无人机蜂群作战系统中的通信拓扑网络问题 在多智能体系统理论中,数学上一般使用图论来描述智能体(无人机)之间的通信拓扑结构。从通信方向方面分类有:有向拓扑与无向拓扑;从通信拓扑结构方面分类则有:固定拓扑与时变切换拓扑。在无人机蜂群作战技术方面,一般采用时变切换拓扑结构,在执行不同任务时无人机之间可以采用不同的通信拓扑结构连接,在任务完成之后又可以切断连接。
|





