时间:2020-08-08 15:52来源:无人机集群 作者:中国通航
|
近年来,无人机集群技术概念的提出及发展,有效解决了单个无人机作业时载荷相对较小,信息感知处理能力相对较弱的不足。无人机集群技术的研究与应用已成为无人机技术发展的一个重要方向,无人机集群不但能通过单机间的密切协作, 有效提升载荷能力和信息处理能力,并且无人机集群具有很高的“自愈”能力和很强的鲁棒性。本文主要介绍了无人机集群技术的相关概念、国内外无人机集群技术研究现状、差异以及无人机集群发展的关键技术和未来无人机集群技术发展趋势,为开展无人机集群的研究提供理论基础。
0 引言
集群概念源于生物学研究。在自然界中,欧椋鸟群、鸽群、雁群、蚁群、蜂群、狼群等大量个体聚集时往往能够形成协调一致、令人震撼的集群运动场景。法国生物学家Pierre Paul Grasse基于白蚁筑巢行为,首次提出了生物集群的概念,并开始了智能集群的研究。典型生物集群行为如图1所示。
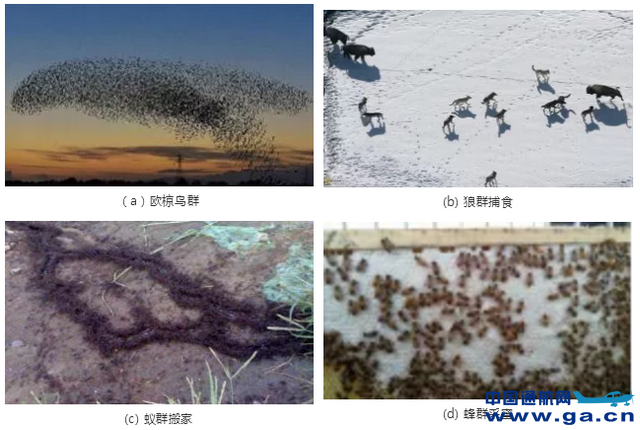 图1 典型生物集群行为
Fig. 1 Typical biological swarm behavior
单无人机的应用,由于受自身条件的限制,面对应用环境的日益复杂以及任务多样,颇显局限。在军事应用上,单机易受自身的燃料、质量和尺寸的限制,无法形成持续有力的打击力度;在民用上,受载荷能力、机载传感器以及通信设备的限制,单架无人机不能很好地完成农林植保、测绘、抢险救灾等任务;在警用安保上,单架无人机也会因被攻击或自身故障导致任务失败等。为解决单无人机应用的局限性,美国空军科学顾问委员会提出未来无人机的应用将是以集群的方式。
无人机集群是指由一定数量的同类或异类无人机组成,利用信息交互与反馈、激励与响应,实现相互间行为协同,适应动态环境,共同完成特定任务的自主式空中智能系统。
无人机集群不是多无人机间的简单编队,而是通过必要的控制策略使之产生集群协同效应,从而具备执行复杂多变、危险任务的能力。未来,无人机集群协同完成任务将成为无人机产业应用的重要方面。无人机集群既能最大限度地发挥无人机的优势,提高整体的载荷能力和信息感知处理能力,又能避免单无人机执行任务时被攻击或任务效率不高的问题。
1 国内无人机集群技术研究现状
无人机已被各国广泛用于国防建设和民用领域,随着无人机技术的深入研究,无人机自主集群系统能够通过紧密的协作完成各种复杂多变的任务,并且具备卓越的协调性、智能性和自主性,已成为无人机研究的一个重要方向。无人机集群作战是指一组具备部分自主能力的无人机通过相关的辅助操作,在作战指挥系统监控下,完成作战任务的过程。美国国防部在《无人机系统路线图2005-2030》中指出,到2025年,集群无人机将具备战场认知能力,能够实现完全自组织作战。
1.1 国外无人机集群技术研究现状
1.1.1 无人机集群分层控制研究现状
对无人机集群实施有效的控制是完成各种复杂集群任务的基础。Cook W.J.等人认为,无人机集群任务规划问题属于复杂问题的组合优化,拟从运筹学角度,采用分层控制方法解决此类问题。Boskovic J.D.等人将无人机集群任务规划问题分解为决策层、路径规划层、轨迹生成层和控制层,其中,决策层负责无人机集群系统中的任务规划与分配、避碰和任务评估等;路径规划层负责将任务决策数据转换成航路点,以引导无人机完成任务、规避障碍;轨迹生成层根据无人机姿态信息、环境感知信息生成无人机通过航路点的可飞路径;控制层控制无人机按照生成的轨迹飞行。无人机集群任务规划分层结构如图2所示。
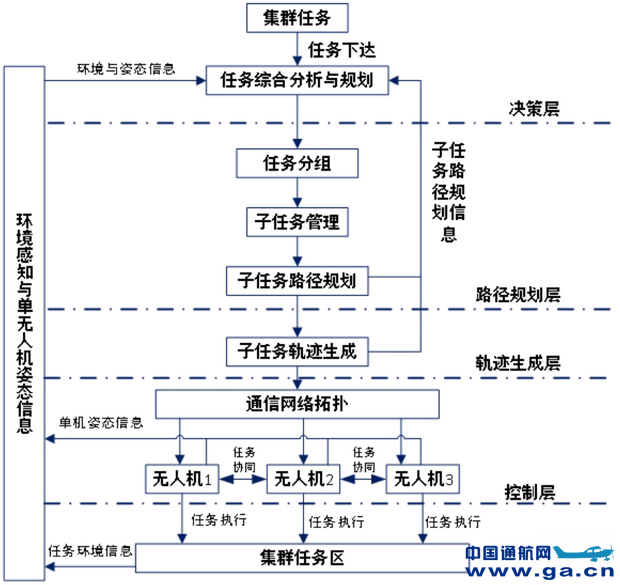 图2 无人机集群任务规划分层结构示意图.
Fig.2 Hierarchical structure of UAV swarm mission planning
Tsourdos A等从多无人机任务协同路径规划的方向将多机协同任务规划分为集群任务规划分配层、协同路径规划层、控制层等三个层次[13]。研究表明,分层控制能够降低无人机集群中任务分配问题的复杂性,提高集群任务分配效率。
1.1.2 无人机集群控制系统研究现状
根据集群控制系统中有无控制中心节点,分为集中式控制与分布式控制系统。集中式控制系统是由控制中心节点完成系统的任务规划和协同工作,多机系统中的无人机只作为任务的执行者。目前,已有多种集中式任务规划的研究方法,如多旅行商问题、车辆路由问题、网络流模型、混合整数线性规划等。其中网络流模型、混合整数线性规划多用于解决多任务时使用。
分布式控制系统中没有控制中心节点,对单机来说在系统中地位是平等的,采用自主管理、协商的方式完成任务。如欧洲信息社会技术计划(IST)开展的异构无人机集群实时协同与控制项目(COMETS)采用的就是异构无人机集群分布式实时控制技术。
1.1.3 无人机集群任务协同算法研究现状
|





